7月4日上午,神舟十二号三名航天员协同配合,正在进行中国空间站首次出舱活动。这次出舱任务,空间站舱外的机械臂首次配合航天员共同完成。机械臂是我国目前智能程度最高、技术难度最大、系统最复杂的空间智能制造系统,机械臂都有哪些功能?是怎么配合航天员完成出舱任务的?


空间站机械臂能真实模拟人手臂的灵活转动
抓取能力达25吨
中国空间站机械臂一共分为三个肩,一个肘和三个腕,外加两个末端执行机构,整个展开之后的长度超过10米。
空间站机械臂是我国首个可长期在太空轨道运行的机械臂,它能真实模拟人手臂的灵活转动,通过旋转结构,能在前后左右的任何角度和部位抓取物体,抓取能力可以达25吨,具有七个自由度的活动能力。
航天科技集团五院空间站机械臂控制系统主任设计师梁常春说:“7个自由度就相当于肩部3个自由度,肘部1个,腕部3个。相当于滚转、平衡加俯仰是3个自由度,肩部和腕部分别是对称的,所以加起来是7个自由度。”

两个末端执行器
除了具有灵活的手臂,机械臂还有明亮的眼睛——视觉系统,以及敏锐的触觉神经,机械臂的肩部与腕部各有一个末端执行器,它可以像人的手掌一样,抓取在轨的舱段或者货物。
末端执行机构,也就是负责移动、爬行以及飞行器捕获的装置。在空间站上一共有两个这样的机构,可以更换,它连接的位置就是腕。
航天科技集团五院空间站机械臂控制系统主任设计师梁常春说:“机械臂在舱上进行爬行的时候,也是通过末端执行器来捕获舱段上的目标收接器实现固联。末端上还配置了腕部相机,通过相机的监视,可以实时成像舱外的图像,包括空间站表面,还有航天员操作等场景。整个机械臂在舱体上的连接,包括机械上的、电气上的、信息上的都是靠末端执行器来完成。它既有机(械)的连接也有电的连接,整个末端可以互换。”
“大脑”在肘部
机械臂的肘部和人类的肘部一样,通过它来连接机械臂的两条直臂,从而实现爬行以及移动。整个机械臂的大脑就在它的肘部。
航天科技集团五院空间站机械臂控制系统主任设计师梁常春介绍:“机械臂肘部它包括一个关节,这边是一个中央控制器。中央控制器相当于整个机械臂的大脑,机械臂的运动,还有信息传输都是靠中央控制器。以太网交换机,就是机械臂上面本身有腕部相机、肘部相机,各路相机图像下传和收集都是靠交换机进行一个中转。”
除了功能强大之外,研制人员还充分考虑了机械臂的运行环境,在安全防护方面也做足了功课。航天科技集团五院空间站机械臂控制系统主任设计师梁常春介绍:“大家常说的重力、温度、宇宙射线,单粒子的影响,包括在控制器选型上都会考虑这些因素,所以都有一些防护,包括这些外壳。本身设计的时候考虑了空间站以外的其他碎片,防撞击的性能也都做过一些相关试验。即使真出现了恶劣情况,应该也不会对本身功能造成影响。”
| 点击 |
三名航天员都有哪些任务?
今天上午,神舟十二号三名航天员协同配合,正在进行中国空间站首次出舱活动。这是继神舟七号飞行乘组顺利完成出舱任务后,时隔13年,中国航天员再次执行出舱任务。在这次出舱任务中,三名航天员都有哪些任务?彼此之间又是如何分工的呢?
此次航天员出舱活动,三名航天员都有明确分工。
出舱的两名航天员,一人要为机械臂安装上臂支架,包括脚限位器、工具台等,随后借助机械臂进行移动。另一名航天员借助舱壁上安装的扶手,爬行一段距离到作业点进行辅助工作,其间还要进行一次应急返回验证。
中国航天员科研训练中心选训室主任王焰磊介绍,因为航天员在舱外做一些作业任务的时候一旦出现紧急情况,航天员必须要快速、紧急返回到气闸舱里边,然后用舱载的应急供氧保证生命安全,所以也要做这方面的验证。
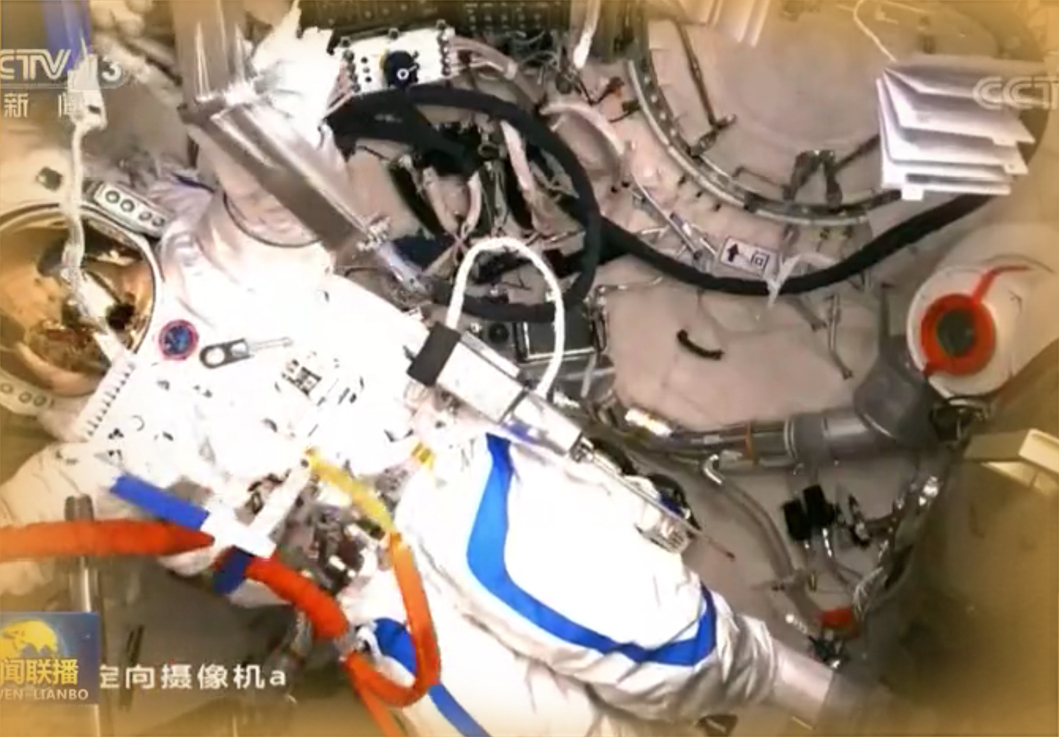
此次出舱活动的另一项重要工作,就是进行舱外全景摄像机的抬升。
中国航天员科研训练中心选训室主任王焰磊介绍,事先,摄像机由于发射的外暴露的限制,把摄像机安装在了一个比较低的位置,它的视场角还是有限的,入轨之后,航天员根据任务需要,需要扩展摄像机的视角来监视整个舱外的情况,需要航天员去把这些摄像机安装一个支架,架得更高一点。
两名航天员出舱过程中,舱内航天员需要对机械臂进行操作,虽然地面人员也可以对机械臂进行大范围转移,但在有航天员站在机械臂上时,舱内航天员可以更直观地对械臂位置进行观察,更能与舱外航天员进行直接交流。
中国航天员科研训练中心选训室主任王焰磊介绍,因为地面的监控手段有限,所以需要舱内的航天员和舱外的航天员之间通过话音沟通,包括舱内的航天员通过仿真软件和他看到的图像进行判断,从而进行操控。另外,由航天员自主操作机械臂,在安全性上也有更好的保障。
“一方面是通过仿真软件的预警功能,另一方面,舱外航天员和舱内航天员都有急停装置,舱外的航天员在运动过程中如果一旦发现有碰撞的风险,他可以直接按下急停装置,机械臂就会停止工作,也是保证安全的多重手段。”
通过航天员在中国空间站的首次出舱活动,航天员出舱能力、应急能力都能够得到有效验证,特别是在舱外进行长时间工作,人与装备的结合为后续航天员对空间站进行维护提供了宝贵经验。
综合央视新闻、中新社等报道